for Human Trajectory Forecasting in Crowds
|
|
|
|
Abstract
|
Human trajectory forecasting in crowds, at its core, is a sequence prediction problem with specific challenges of capturing inter-sequence dependencies (social interactions) and consequently predicting socially-compliant multimodal distributions. In recent years, neural network-based methods have been shown to outperform hand-crafted methods on distance-based metrics. However, these data-driven methods still suffer from one crucial limitation: lack of interpretability. To overcome this limitation, we leverage the power of discrete choice models to learn interpretable rule-based intents, and subsequently utilise the expressibility of neural networks to model scene-specific residual. Extensive experimentation on the interaction-centric benchmark TrajNet++ demonstrates the effectiveness of our proposed architecture to explain its predictions without compromising the accuracy. |
||
| |
||
Key Idea
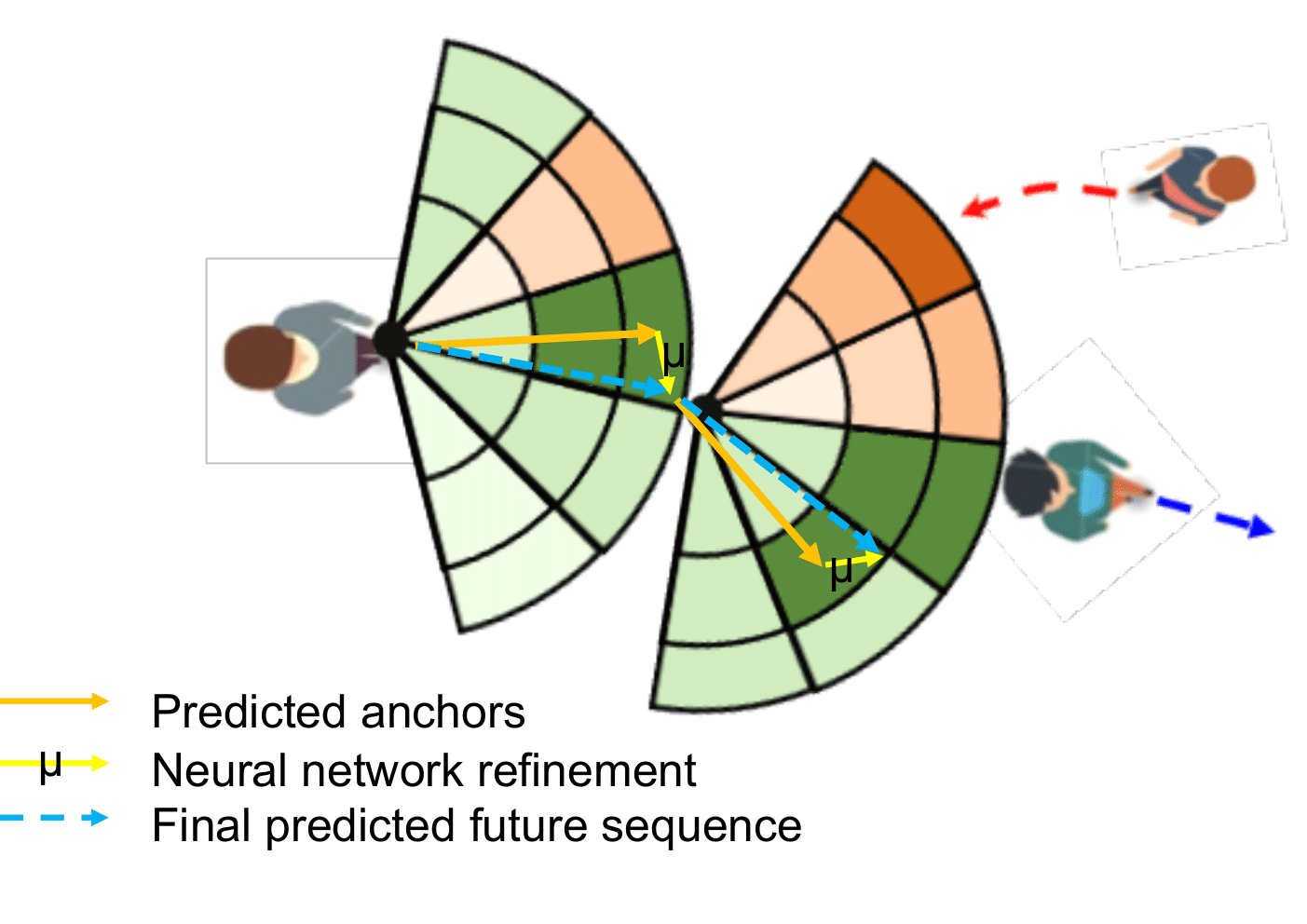 While navigating in crowds, humans display various social phenomena like collision avoidance (from red trajectory) and leader follower (towards blue trajectory). We present a model that not only outputs accurate future trajectories but also provides a high-level rationale behind its predictions, owing to the interpretability of discrete choice models. (Un)favourable anchors shown in green (red). |
||
| |
||
Method Overview
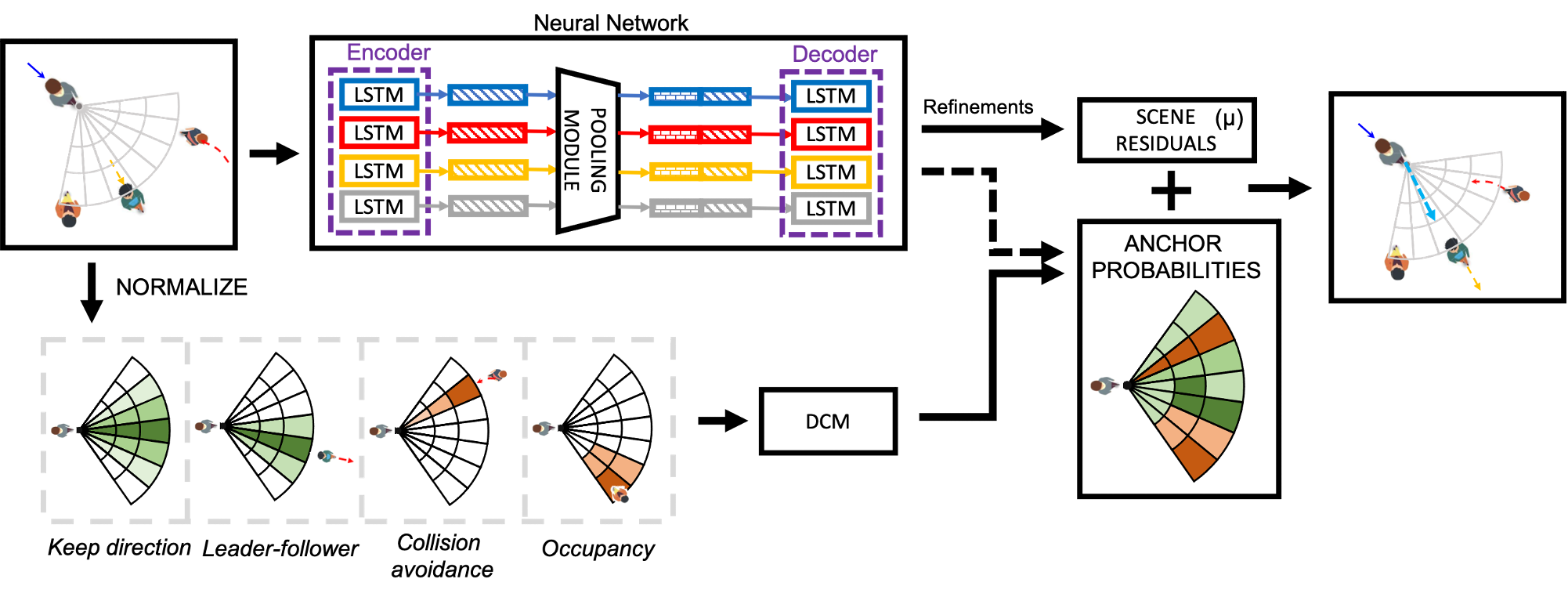 At each time-step, the output space of each pedestrian is discretized into a set of possible future intents, normalized with respect to the pedestrian's speed and direction, forming a radial grid. Discrete choice modelling (DCM) is used to predict the next step probability distribution (green high, red low) in an interpretable manner by accumulating the \textit{keep direction, leader-follower, collision avoidance} and \textit{occupancy} rules. A neural network refines the predicted anchor distribution with scene-specific residuals that account for the subtle interactions that the DCM rules fail to model. The neural network also provides the past motion embedding and interactions embedding which can be added to the hand-crafted DCM functions to better handle complex social interactions and long term dependencies while choosing the future intents. |
||
| |
||
Results
 |
||
|
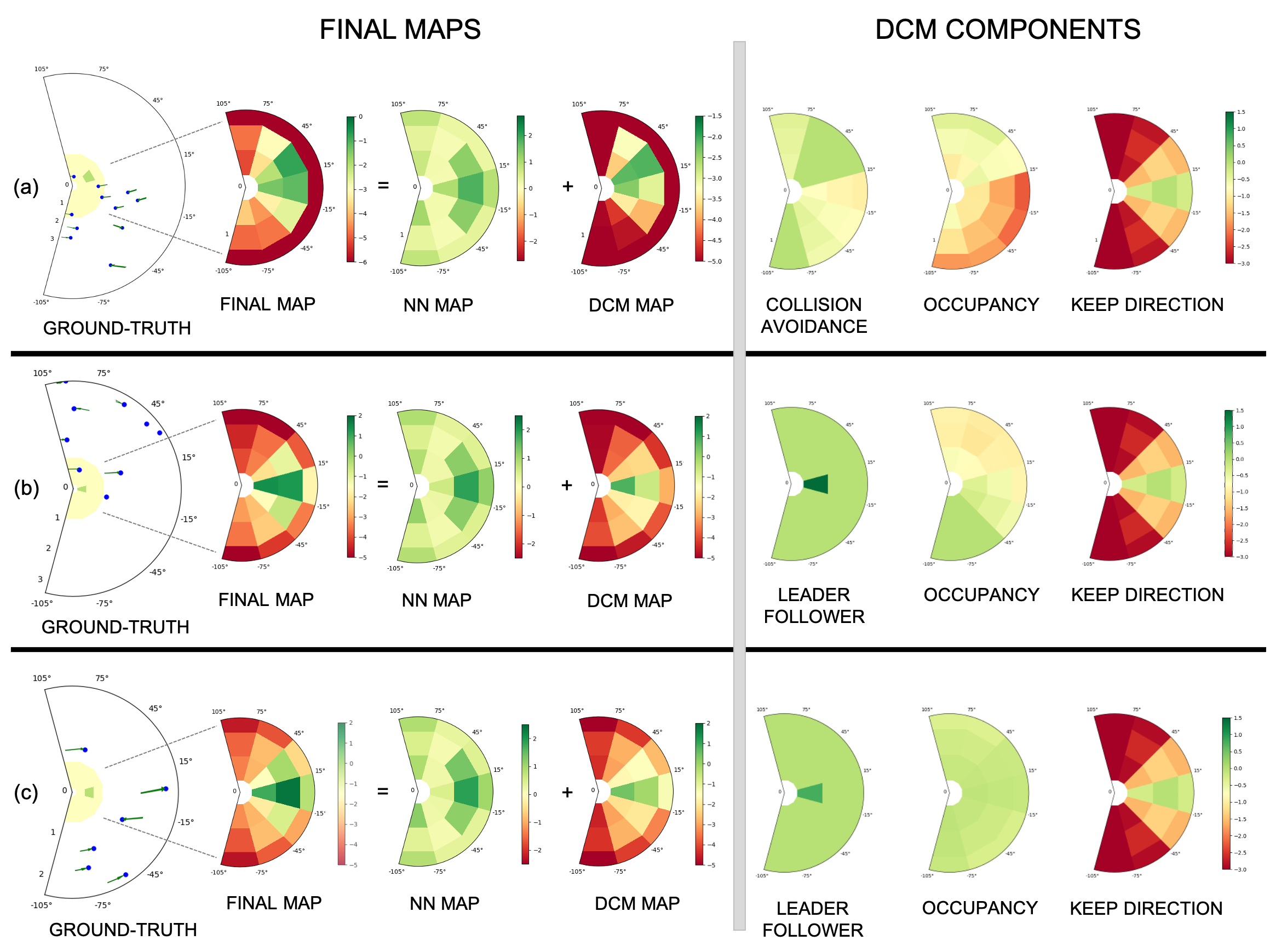
Qualitative illustration of the ability of our architecture to output high-level interpretable intents. The direction of motion of the pedestrian of interest is normalized and is facing towards the right. Current neighbour positions are shown in blue and current velocities are shown in green. The ground-truth choice is highlighted in light green. (a) In the first row, the decision of the network is strongly influenced by the collision-avoidance and occupancy map of the DCM. Consequently, the pedestrian changes the direction of motion and turns left maintaining constant speed. (b) In the second row, the leader-follower map exerts a strong influence on the final decision-making causing the model to choose the anchor corresponding to slowing-down. (c) In the third row, the leader-follower map is not strong in intensity and the neural network map guides decision making resulting in the model maintaining constant speed. |
 |
P. Kothari, B. Sifringer, A. Alahi. Interpretable Social Anchors for Human Trajectory Forecasting in Crowds CVPR 2021 (Poster) [Paper] [Bibtex] [Github] |
Acknowledgements |